Accelerometer Controlled Robot Using Zigbee Module
Abstract
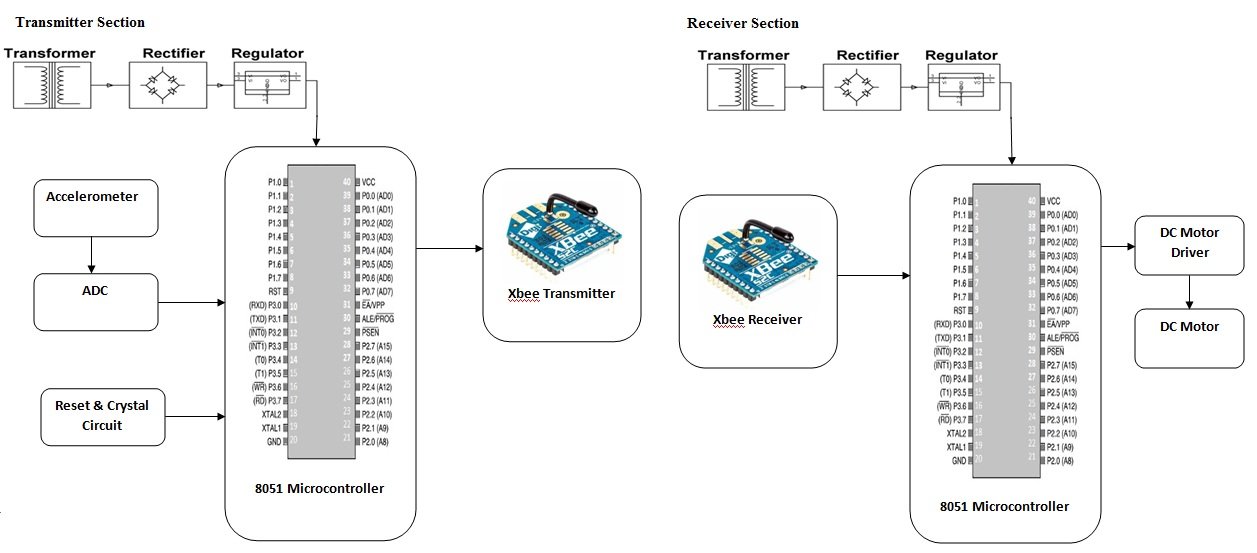
In this project we proposed an accelerometer-based system to control an industrial robot using low-cost and small 3-axis wireless accelerometer. This system is made of one or more accelerometers in different axes. All the accelerometers aside allow to measure accelerations in coordinated axes. Accelerometers can be used to collect data or to determine position (by integration).The aim is that the robot starts the movement almost at the same time as the user starts to perform a gesture or posture (low response time). The results show that the system allows the control of a robot in an intuitive way.
Most accelerometers do not display the value they measure, but supply it to other devices. Real accelerometers also have practical limitations in how quickly they respond to changes in acceleration, and cannot respond to changes above a certain frequency of change. Single- and multi-axis models of accelerometer are available to detect magnitude and direction of the proper acceleration, as a vector quantity, and can be used to sense orientation (because direction of weight changes), coordinate acceleration, vibration, shock, and falling in a resistive medium. Micro machined accelerometers are increasingly present in portable electronic devices and video game controllers, to detect the position of the device or provide for game input.
The accelerometer gives output of X, Y, Z coordinate values of his present location with respect to its initial position. In this project we are using an accelerometer to read the position of the remote, with the present X, Y, Z coordinate value we will assign a motion for the robot. We will take five different positions for having five different motions in the robot they are Forward, Back, Left, Right and Stop The robot is designed with differential drive mechanism to have low turning radius and can be travel on some of the uneven surfaces too. To provide remotely operation we are using a Zigbee module. Using this Zigbee module we can control the robot from 100ft away.
Hardware Requirement
Microcontroller: AT89S52
Power Supply: 5V-12V
Three Axis Accelerometer
Zigbee Module
Two 12v Dc Motors
Software Requirement
Embedded C
KEIL IDE
Advantages
Low/Moderate cost
Small in size and sensitive to acceleration forces due to movement
A non-expert robot programmer can control a robot quickly and in a natural way.
Continuous and efficient monitoring.
Short set up time for the system.
Disadvantages
Need steady hands to operate.
Very sensitive.
Applications
Developing Medical equipment.
Industrial Machinery.