Autonomous Floor Cleaning Robot
Abstract
An autonomous floor-cleaning robot comprises a self-adjusting cleaning head subsystem that includes a dual-stage brush assembly having counter-rotating, asymmetric brushes and an adjacent, but independent, vacuum assembly such that the cleaning capability and efficiency of the self-adjustable cleaning head subsystem is optimized while concomitantly minimizing the power requirements thereof. The autonomous floor-cleaning robot further includes a side brush assembly for directing particulates outside the envelope of the robot into the self-adjusting cleaning head subsystem.
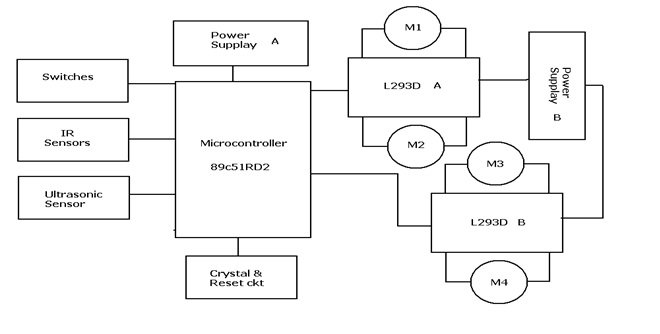
The drives of the motor and cleaning modules are controlled through microcontroller .The existing technology is the robot moves in a random manner in a period of time which may also leave some areas without cleaning. But this robot goes in predefined path so that it senses obstacle and deviates; it never leaves any areas without cleaning.